



“Comando gestuale” – Alternanza Scuola-Lavoro
Prove di “Comando gestuale”
Il prototipo è stato realizzato dagli studenti della 4°E, 4°Bt e 4°I del Ferraris nelle attività di Alternanza Scuola Lavoro che il nostro istituto effettua in collaborazione con l’associazione Dam Bros Robotics.
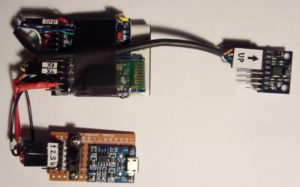
Il sistema consente di comandare un robot-rover mediante comandi gestuali, a tal fine è utilizzato un accelerometro-giroscopio (simile a quelli presenti negli smartphone), che è stato montato sul dorso di un guanto. Mediante l’accelerometro-giroscopio i movimenti della mano vengono rilevati ed inviati ad un microcontrollore, che li elabora e successivamente utilizzando un modulo Bluetooth li trasmette al robot-rover. Il rover è dotato a sua volta di un modulo Bluetooth, il cui compito è quello di ricevere i dati trasmessi dal guanto e di inviarli ad un’altro microcontrollore.
I movimenti della mano vengono quindi opportunamente elaborati dal microcontrollore del robot-rover in modo da fornire ai motori delle ruote i giusti comandi di direzione.